平台介绍
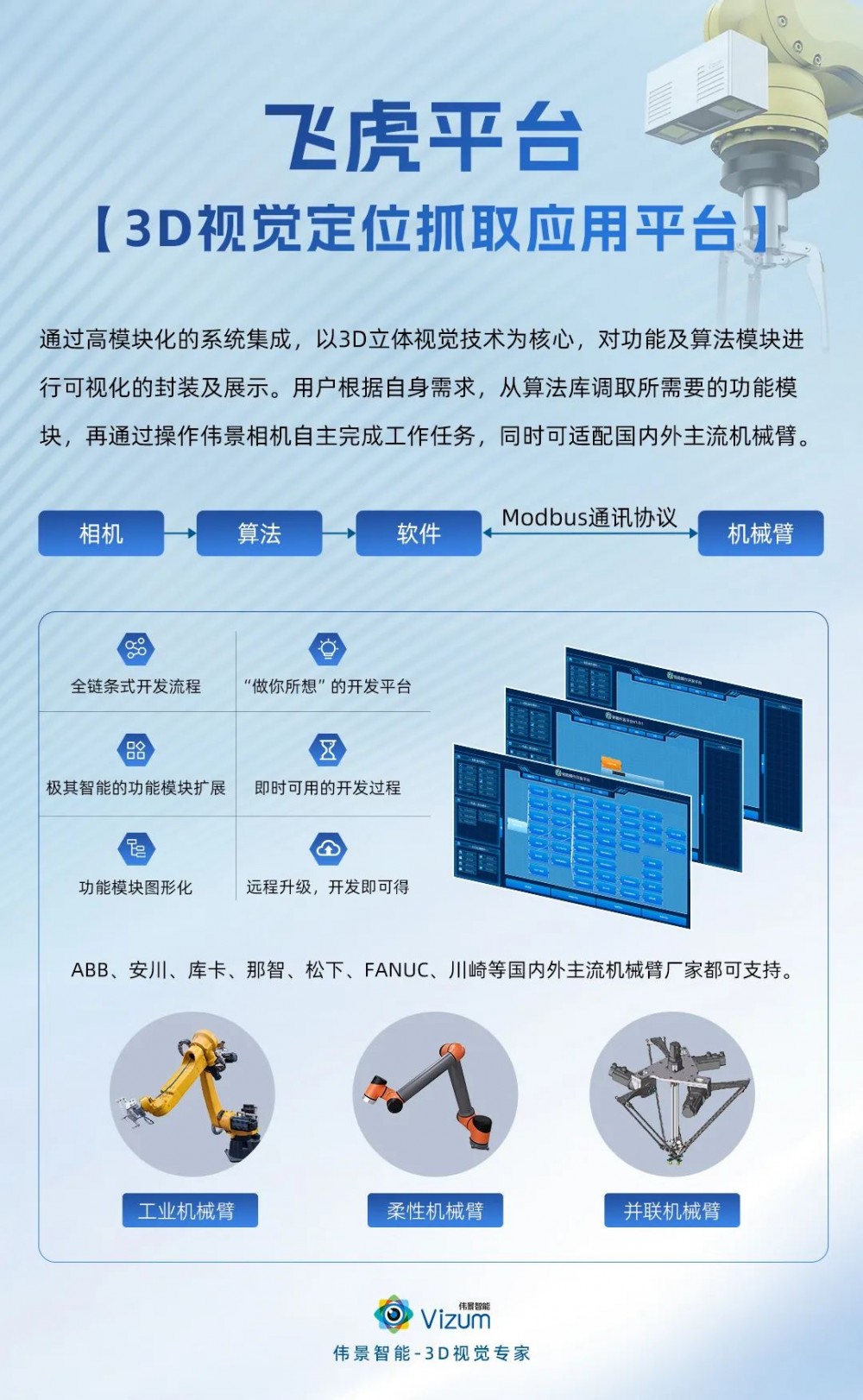
随着工业自动化的快速发展,定位抓取技术也在不断进步。在自动化装配线和仓储物流等场景中,精准的定位和抓取是确保生产效率和质量的关键。对于众多场景的的机械臂抓取操作过程,都不是简单的绝对位置控制与标准动作操作,因此都需要进行基于立体视觉的智能化开发。3D视觉定位抓取应用平台(飞虎平台)满足智能化开发中的统一化、规范化、标准化的要求,并通过图形化编程实现定位抓取系统的快速部署。
平台特点
01全链条式开发流程
全链条式开发流程是飞虎平台应用于智光眼专用相机的一大亮点。它将底端视觉系统与机器人用户端无缝连接,用户可以根据不同的应用场景自主完成整个项目的功能流程化设计,并直接对接机械臂系统。这种一体化的开发流程,使得基于机器视觉的物品抓取系统的开发更加高效、便捷。
02“做你所想”的开发平台
飞虎平台秉承"做你所想"的理念,具有通用性的设计。它能够解决大部分智能化抓取和搬运过程中的视觉立体感知及坐标姿态认知问题,实现机械臂的快速应用。用户可以根据自己的需求和创造力进行开发,即可快速满足抓取类应用的设计开发,同时也拥有更大的自由度。

03功能模块图形化
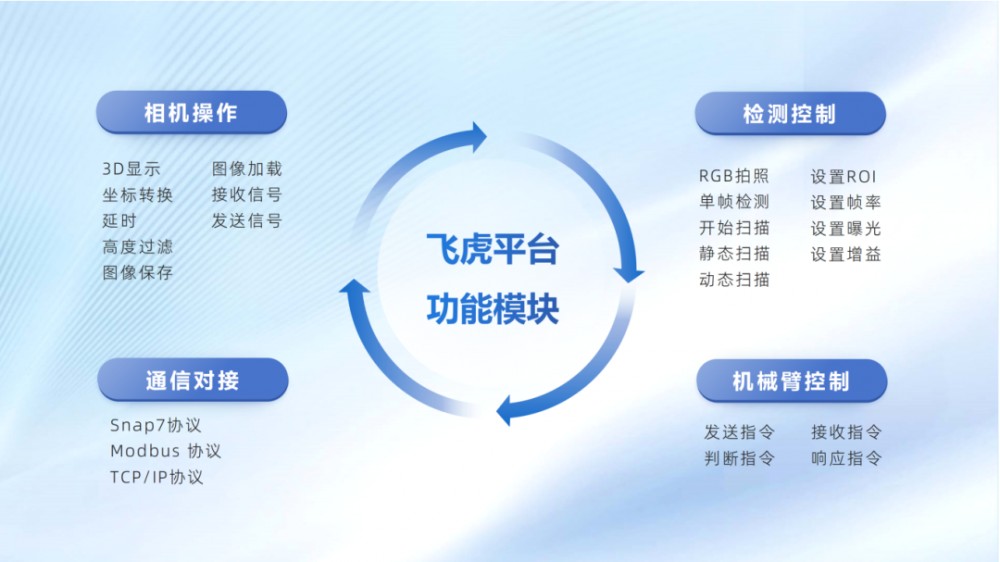
功能模块图形化是飞虎平台的又一特点。飞虎平台集成了相机本身的多类应用功能及软件算法库,并采用了图形化展示的方式呈现各个功能模块。这样的设计使得开发过程方便快捷,简单易懂。不需要具备深入的编程知识,通过模块化的拖拽和连接,用户也能轻松完成。
04极其智能的功能模块扩展
飞虎平台具有极其智能的功能模块扩展能力。飞虎平台所有的功能模块都可以重复使用,并且可以进行并行构建。用户可以针对相同的应用场景使用多种功能算法进行并行验证,大大提高了开发速度和验证效率。对于特殊场景和定制应用,仅需导入专用模块即可完成搭建,灵活的扩展性使得飞虎平台能够更加灵活地应对各种需求。

05即时可用的开发过程
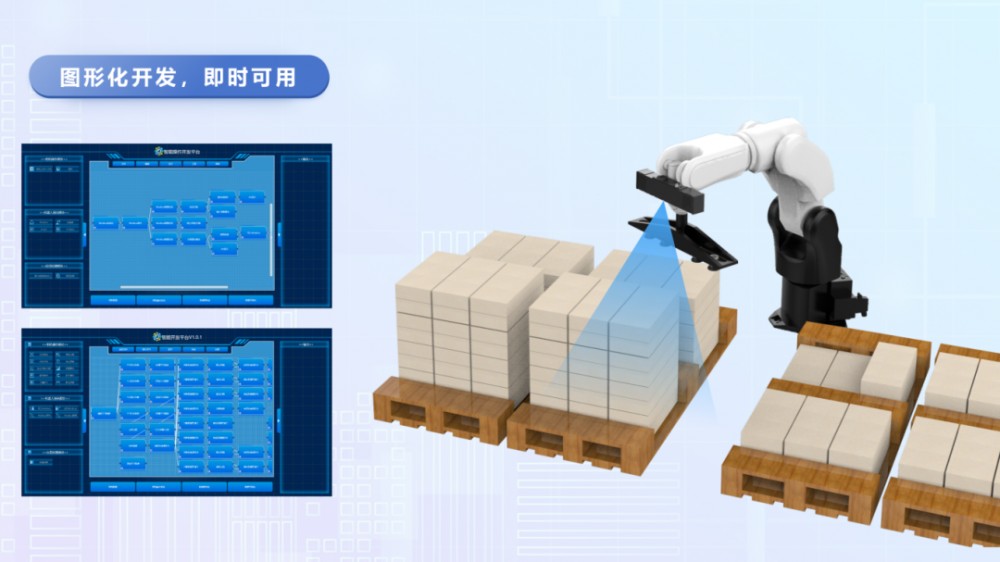
在开发过程中,飞虎平台搭载智光眼专用相机可以提供即时可用的体验。通过图形化功能模块拖拽操作,用户可以即时查看相机的参数配置、所扫描的三维图、检测过程、检测性能和数据结果等信息。这样的即时可用开发过程,使得用户能够实时调整和改进系统,提高开发效率和准确性。
06远程升级,开发即可得
智光眼专用相机支持远程升级功能,包括软件功能和定制算法。用户只需要在五分钟之内就可以创建一个智能化抓取改造项目。这样的快速开发过程,使得用户能够及时获取最新的功能和性能改进,保持应用的先进性和竞争力。

平台功能
01定位引导抓取应用功能
物体角点及中心点定位
可对抓取物体的角点进行坐标提取以及中心点坐标进行提取,完成自动化抓取。
圆形边缘及圆心坐标定位
可对圆形物体的边缘及圆心坐标进行提取,完成自动化抓取。
物体姿态定位
可对物体的角度姿态进行法向量定位,引导机械臂的抓取角度。
图形功能拖拽式操作
3D建模、功能应用算法、手眼标定算法、机械臂通讯软件、信号触发等直接封装成图形化模块,用户可直接进行拖拽式项目流程构建。
丰富的图像处理及点云处理工具
对图像的质量以及3D点云数据的后处理,该平台封装大量算法工具,用户可根据不同场景进行调试。
自动化抓取工程的快速建立
该平台采用底(底层技术的模块图形化操作)到端(用户项目的DIY应用落地)的系统设计,用户可流程化的对各环节模块进行功能搭建,并可直接对接到机械臂系统。
02
系统对接功能
通讯协议接口对接
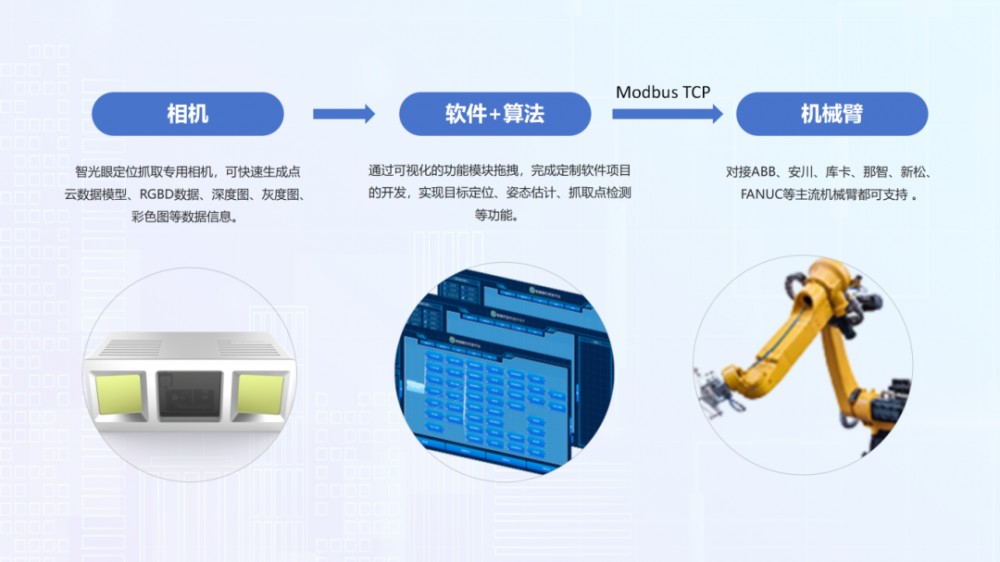
Snap7、Modbus TCP、TCP/IP等多种标准通讯协议,定位结果数据可直接对接机械臂控制系统。
支持机械臂
ABB、安川、库卡、那智、松下、FANUC、川崎等国内外主流机械臂厂家都可支持。
应用场景
飞虎平台与智能抓取3D相机配合,可广泛应用于定位抓取类的各种场景。






