ISO12100要求首先识别危险,并进行安全防护,直至各种危险成为可接受的风险。
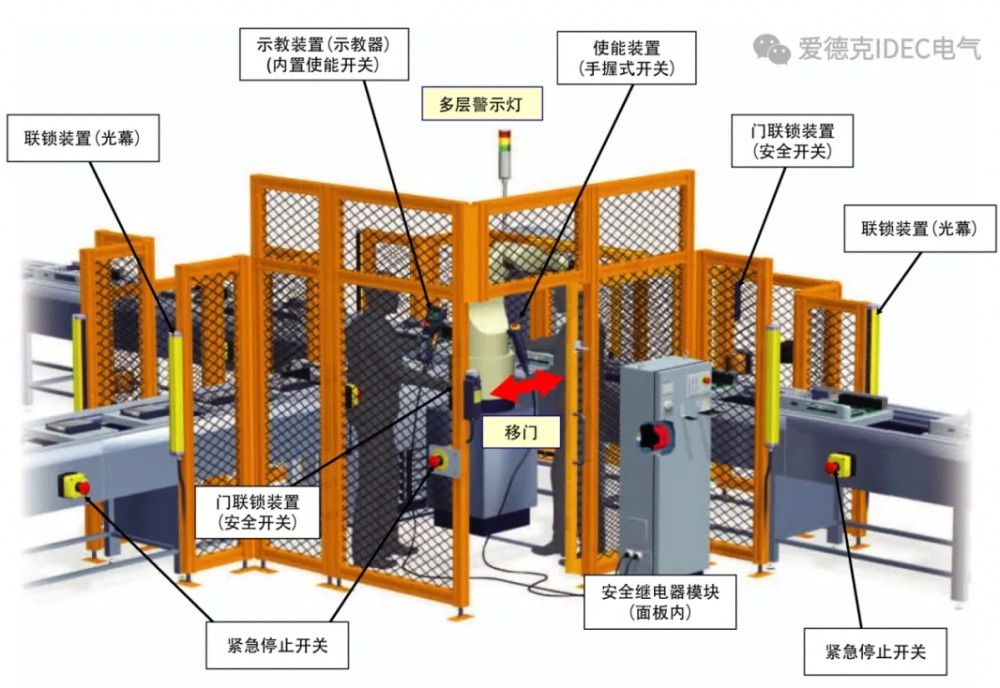
爱德克以工业用机器人的生产设备为例,来为大家介绍完成下图所示的安全系统所需的安全防护措施的具体流程。
在示教模式下采取防护措施的流程:采取防护措施后的系统。
01、采取防护措施前的系统
初始状态:
自动运行模式下的安全防护措施已经完成。
在示教模式下,机器人为低速运行模式。
危险:示教作业时低速/低功率运行的机器人。
危险事件:在安全护栏内作业的人员与低速运行的机器人接触。
02、第1步:采取本质安全设计措施
・去除机器人的锋利部分
・使用示教器时不能执行自动运行模式
例如,使用带钥匙的开关切换模式、访问代码方式等。需要标明所选择的模式(选择器的位置、显示器、指示灯等)。
机器人低速运行,但遭遇危险事件时,没有使机器人停止的装置。
03、第2步:实施安全防护(安装安全设备)
只有在作业人员确认安全的情况下,可以通ky体育过使能开关进行运行,遭遇危险事件时,切断动力。
示教器用户使用示教器附带的使能开关,其他人员使用手握式使能开关。
遭遇危险事件时,可以通过使能开关切断动力。但是没有在紧急情况下,通过作业人员本人的判断停止机器人的装置。
04、第2步:补充保护措施
在作业位置附近设置紧急停止装置。
在示教器上安装紧急停止开关。
在安全护栏内部各面上安装紧急停止开关。
安装了各种安全设备,但在安全设备控制失效时,仍然存在变为危险状态的可能性。
需要根据风险评估的结果,根据风险选择性能等级,构建安全系统。
05、通过控制确保安全
使用安全控制器和安全继电器模块等构建通过风险评估选择的、与所需性能等级相对应的安全系统。
这里的危险是指工业机器人,因此,性能等级确定为大于等于“c”。
即使将风险降低至可接受的程度,但风险仍然存在(剩余风险)。
06、第3步:通过使用信息应对剩余风险
通过使用说明书、危险标示、警告装置等标示剩余风险。
长按二维码
了解IDEC安全产品详细信息






