工业机器人手爪是一种关键的机器人配件,它们用来抓取、握持和操控物体。随着工业自动化技术的发展,机器人手爪在制造业和生产领域的应用越来越广泛。本文将详细介绍工业机器人手爪的各种种类及其特点,帮助您更好地了解和选择适合自己需求的机器人手爪。
一、平行爪(Parallel Grippers)
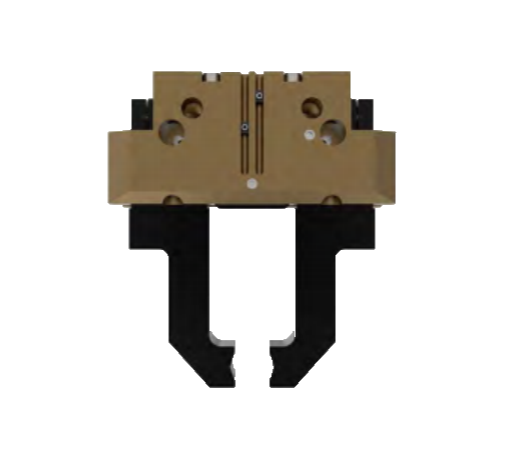
平行爪是最常见的机器人手爪之一,它们有两个对称的夹爪,通过对称运动来抓取物体。平行爪可以在两个夹爪之间提供均匀的、平行的夹持力,适用于多种应用场景。其特点包括:
1.夹持力强大:平行爪通常具有较高的夹持力,可以稳定地抓住各种重量的物体。
2.抓取范围广泛:平行爪的夹爪可以调节,适用于各种不同尺寸和形状的物体。
3.灵活性高:平行爪可以根据具体需求进行夹持力的调节,使其适应不同的工作场景。
二、垂直爪(Vertical Grippers)
垂直爪是另一种常见的机器人手爪,它们与平行爪不同,具有上下夹爪的结构。垂直爪通过上下运动来夹持物体,并提供稳定的夹持力。垂直爪的特点包括:
1.垂直夹持能力强:垂直爪的夹持力通常较高,可以在垂直方向上牢固夹持物体。
2.适用于有限工作空间:由于垂直爪的夹爪结构,它们在有限的工作空间内也能灵活抓取物体。
3.稳定性好:垂直爪在夹持物体时可以提供稳定的支撑,确保物体不会滑落或脱落。
三、指形爪(Finger Grippers)
指形爪是一种特殊设计的机器人手爪,其夹爪形状类似于人手指。指形爪通常由多个可调节的指状部件组成,可以适应不同形状的物体。指形爪的特点包括:
1.灵活性高:指形爪的指状部件可以根据物体的形状和大小进行调节,适用于多种不同的抓取任务。
2.精确性好:由于指形爪的指状部件可以调节,它们能够更加精确地夹持物体,避免过分夹紧或夹松。
3.适用于复杂环境:指形爪可以灵活适应复杂环境中的抓取任务,例如抓取不规则形状的物体或者在狭小空间中进行抓取操作。
四、机械手爪(Robotic Grippers)
机械手爪是一种具有复杂机械结构的机器人手爪,常用于需要更高级功能的应用场景,例如需要旋转、倾斜或具有特殊抓取模式的任务。机械手爪的特ky体育官方平台(kaiyun)点包括:
1.多功能性:机械手爪通常可以执行多种抓取操作,如旋转、倾斜、分离等,适用于复杂的生产任务。
2.高度定制化:机械手爪的结构和功能可以根据具体需求进行定制,满足特定任务的要求。
3.精准度高:机械手爪通过复杂的运动和控制系统,可以实现精确的抓取和操控操作,提供高度的精准度和控制能力。
综上所述,工业机器人手爪的种类多样,各具特点,可根据具体应用需求进行选择。平行爪适用于一般性的抓取任务,垂直爪适用于垂直方向的夹持,指形爪适用于灵活和精确的抓取任务,机械手爪则适用于更高级的功能性要求。有效选择适合的机器人手爪,将能够提高工业生产的效率和质量,实现更加智能化和自动化的生产过程。
-ky体育官方平台(中国)官方网站




