工业生产领域,机器人的使用者最在乎的性能指标,就是生产节拍和定位精度了。协作机器人给人的印象是精度差,可事实真的是这样吗?协作机器人为了保障安全限制了速度,生产节拍如何呢?
今天,捷勃特用数据说话,带您深度探讨机器人性能。看看捷勃特GBT-C5A是如何在保障安全的同时,性能上技压群雄的。
首先请出我们的徕卡激光跟踪仪作为今天的裁判,它每1毫秒进行一次记录,把机器人末端的完整运动数据记录下来。

△ 徕卡激光跟踪仪
按照ISO9283性能测试的推荐方式,运动的轨迹我们选择一条空间上的260毫米的斜线,机器人末端的负载是4.5kg。我们统计出以下数据:
1) 机器人运动过程的最高速度
2) 机器人从开始运动,到运动结束的时间
注意:这里运动结束的标志是负载稳定在目标位置周围0.1毫米的空间内
我们看捷勃特GBT-C5A的表现:
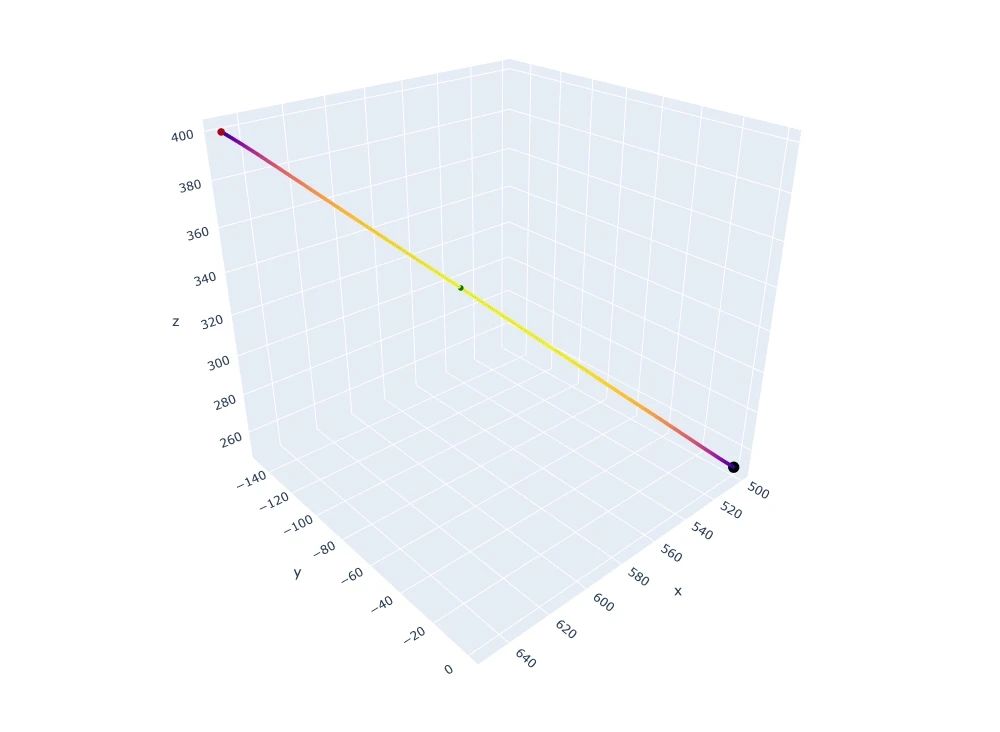
最高速度
950.8毫米/秒
运动时间
553毫秒
△ 捷勃特GBT-C5A直线运动
再来看国内头部竞品品牌的表现:
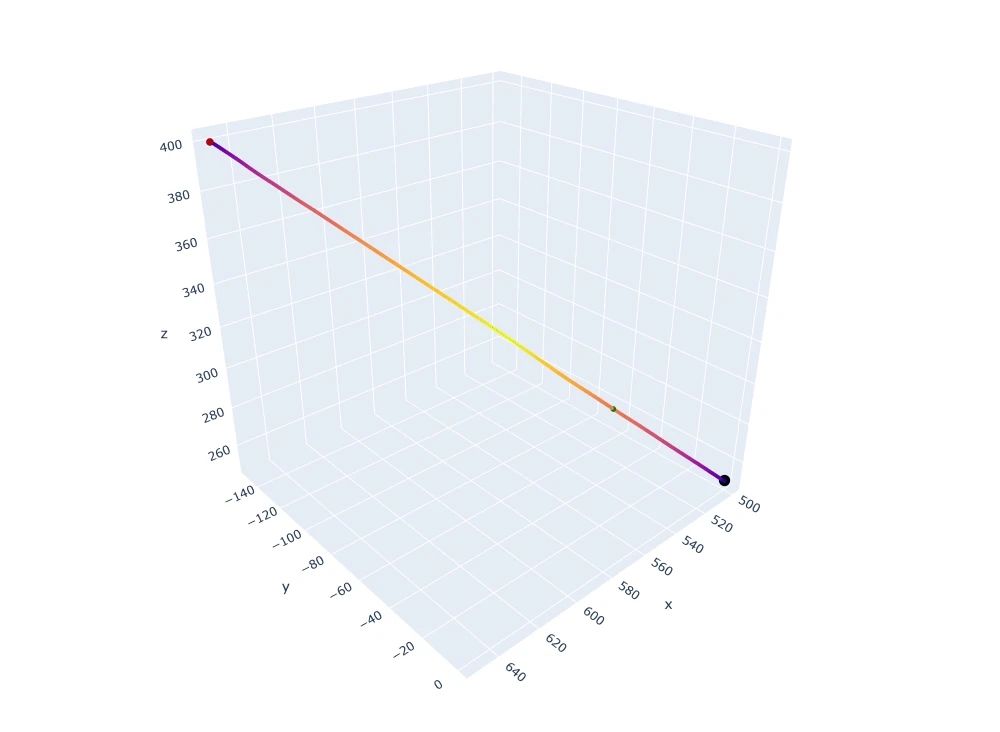
最高速度
979.4毫米/秒
运动时间
869毫秒
△ 国内头部品牌竞品直线运动
很明显,在运动时间这一个指标上,两个品牌差距显著!GBT-C5A仅用时553毫秒,而竞品用时869毫秒!换句话说,即使是在竞品的最高速度相当的情况下,其运动完成耗时居然比GBT-C5A多了57%!这背后到底发生了什么?
放大整个运动轨迹的最后1毫米,我们找到了答案:
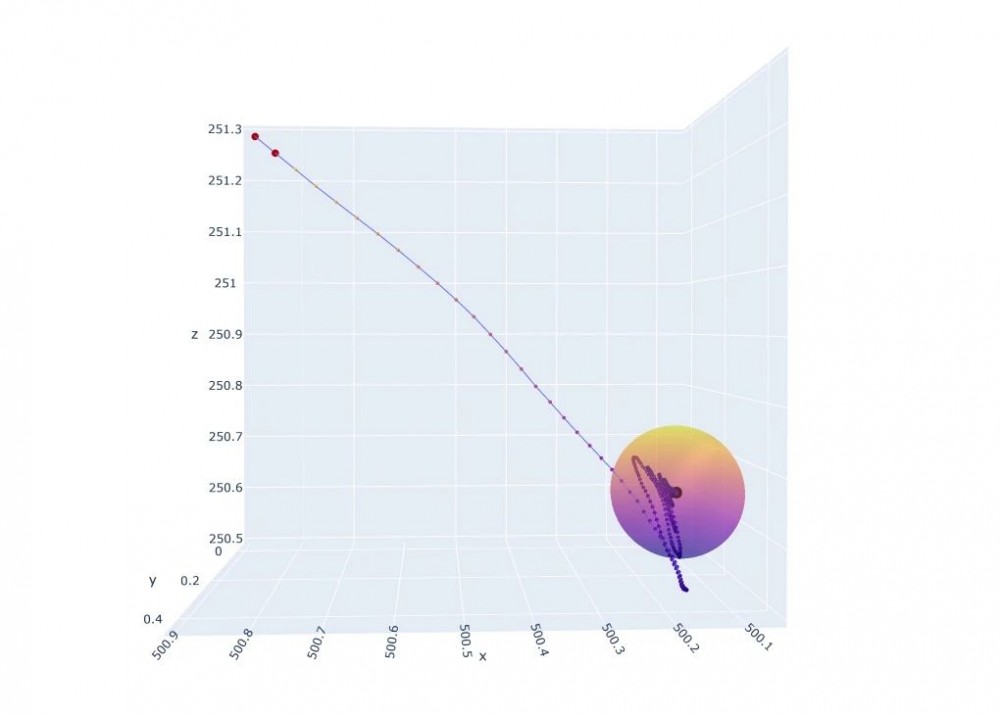
△ GBT-C5A,运动轨迹最后1毫米数据,图中的球体是以目标为球心,0.1毫米为半径
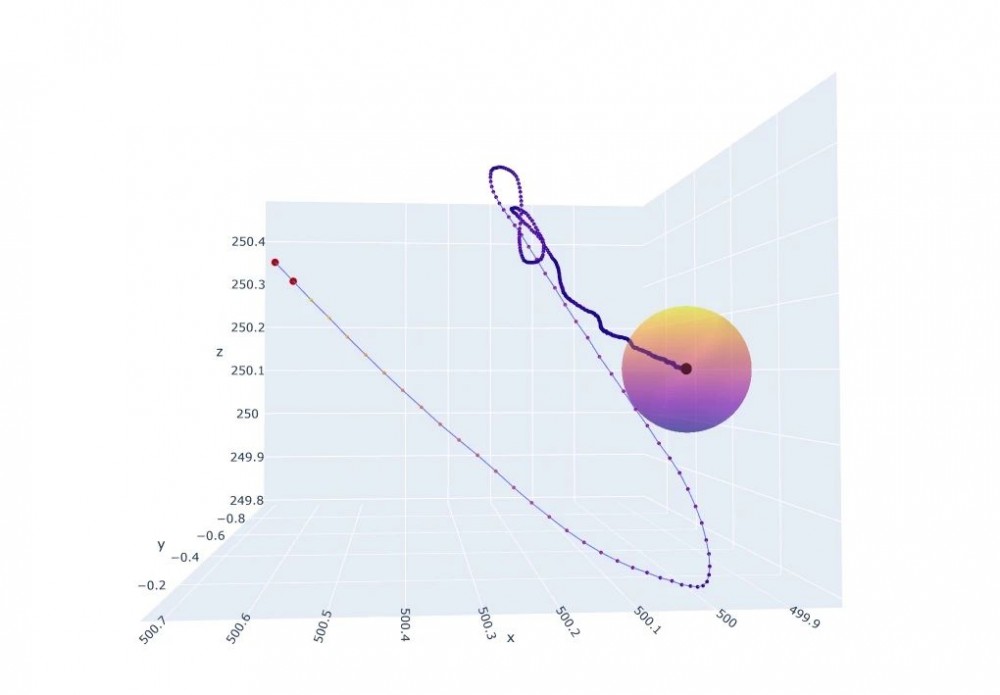
△ 国内头部品牌竞品,运动轨迹最后1毫米数据,图中的球体是以目标为球心,0.1毫米为半径
上面两张图非常清晰的表明了两个机型的最后1毫米运动轨迹。可以看到,GBT-C5A快速地靠近目标并迅速抑制了抖动,而竞品非常缓慢地靠近目标(图中点位越密,代表速度越慢),并且在围绕球心点反复震荡一定时间后才稳定在0.1毫米球体内,这也就解释了为什么竞品运动时间远比捷勃特高出许多的原因。而探究最后1毫米的运动轨迹的现实意义在于为机器人在真实应用场景下的高精度和高节拍的衡量指标提供了新的参考和依据!通俗理解,就是两台同样标注为重复定位精度为0.02毫米性能指标的协作机器人,但在实际的场景应用中机器人有着差异明显的使用体验,并且与机器人的稳定时间、抖动抑制等指标均有关联性。不仅如此,用时更长的竞品还会体现出明显的过冲,在一些场景可能对机台或工件产生破坏。
再往深一层次研究,以上运动轨迹的不同表现,其实是由机器人整体的运动控制技术所决定的。依靠基于SCIMC的Hyper Ring(超闭环)技术,捷勃特GBT-C5A表现出了出色的控制能力,再加上自身出色的加减速能力,GBT-C5A实现了更加高效的生产,并表现为更高的精度。这才是对客户最有实质意义的性能。
-ky体育官方平台(中国)官方网站




