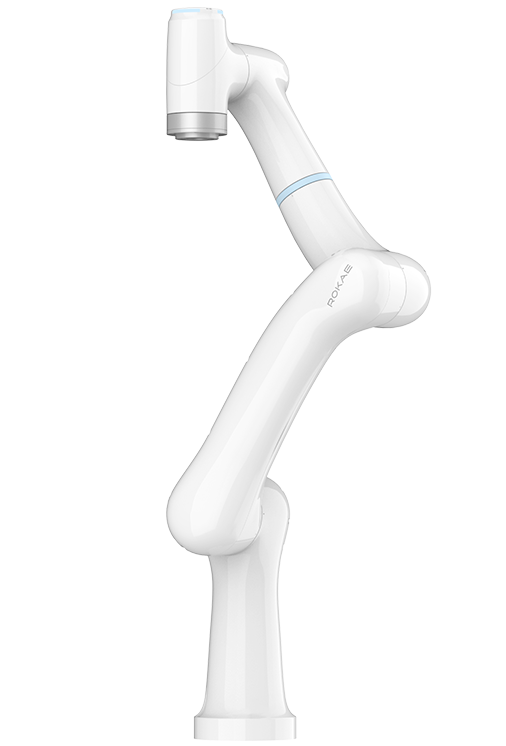
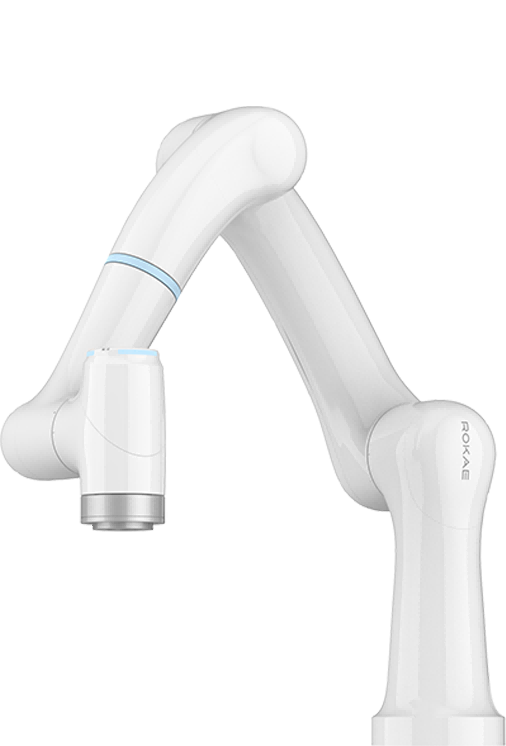
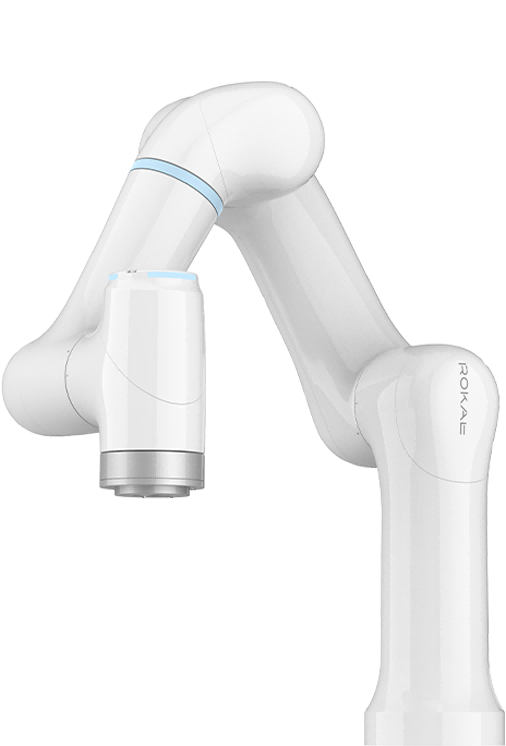
SR-C協働ロボット

xMate SR Flexible Collaborative Robotの機能と核心的な利点を引き継ぎながら、xMate SR-Cはコントローラーをボディから独立させ、より狭いベースの設置環境にも対応可能な独立したコントロールキャビネットを採用しています。加えて、xMate SR-Cは5kgの負荷容量を持ち、性能が全面的にアップグレードされています。
お問い合わせ SR-Cシリーズ
デモ機の申し込み