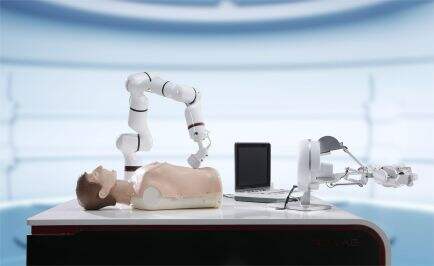
ER Series Collaborative Robots

○ The xMate ER series flexible collaborative robots feature torque sensors for all joints.
○ Powered by direct force control with full state feedback, they excel in obstacle avoidance and collision detection, and ensure high precision of position control without sacrificing the highly dynamic force control and compliance control function.
○ Practical direct teaching control and RL programming language provide users with a simpler and more comprehensive programming experience.
○ Open RCI low-level control satisfies the requirements of high-end users in such fields as education, research, and automatic process development.
○ Powered by direct force control with full state feedback, they excel in obstacle avoidance and collision detection, and ensure high precision of position control without sacrificing the highly dynamic force control and compliance control function.
○ Practical direct teaching control and RL programming language provide users with a simpler and more comprehensive programming experience.
○ Open RCI low-level control satisfies the requirements of high-end users in such fields as education, research, and automatic process development.
ER Series
Request A Demo